Mini Rover-Object Detecting Ground Vehicle (UGV)
Keywords:
Object Tracking, Classification and recognition, GSM BAsed AlarmAbstract
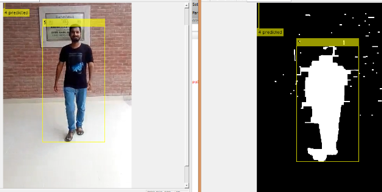
This paper proposes the multipurpose, wirelessly controlled UGV which can move across the surface, detect objects and classify them. It can also monitor and inspect object under interest, if detects any undesirable condition then inform corresponding authority for further immediate actions. The Mini Rover is a programmable machine with built in capability of executing certain set of predefined actions automatically. It can interact and get perception of environment via certain set of sensors and actuators. UGV will be able to go to places that human cannot reach for the sack of exploration and observation without an onboard human presence. UGVs are used for the purpose of search and rescue, security and surveillance, terrain and forest monitoring because it is inconvenient, inefficient, dangerous, and sometimes impossible to have a human operator present in such environments. Major problems faced by UGV in natural terrain environment are reliable sensing, route finding, and object detection and identification. We combine a set of sensors and image processing techniques to counter these problems by getting a more extensive perception of the environment.
Downloads
Published
How to Cite
Issue
Section
License
University of Sindh Journal of Information and Communication Technology (USJICT) follows an Open Access Policy under Attribution-NonCommercial CC-BY-NC license. Researchers can copy and redistribute the material in any medium or format, for any purpose. Authors can self-archive publisher's version of the accepted article in digital repositories and archives.
Upon acceptance, the author must transfer the copyright of this manuscript to the Journal for publication on paper, on data storage media and online with distribution rights to USJICT, University of sindh, Jamshoro, Pakistan. Kindly download the copyright for below and attach as a supplimentry file during article submission